Personal Web
Hankyu Kim
I'm a Robotics Engineer with a passionate for building intelligent systems. I have 2 years of experience developing autonomous driving technologies and a degree in Electronics and Electrical Engineering, Currently I am pursuing my Master's in ECE at UCSC, exploring the intersection of robotics, control, and AI.
About me
Welcome to my engineering journey. My work reflects a strong commitment to building reliable and scalable systems, where every line of code contributes to a greater whole.
I thrive in collaboration, bridging communication across teams to achieve shared goals. I believe talented individuals can create extraordinary solutions, and I am dedicated to fostering an environment where innovation flourishes.
If you're curious to explore more of my work, you can follow me:

Work experience
SW Engineer
MORAI Inc., Seoul, South Korea
Apr 2024 - May 2025
Architected and developed a multi-threaded communication module for real-time data exchange between real robots/vehicles and the simulator using UDP, TCP/IP, gRPC, and ROS.
Created virtual sensor data (cameras, LiDAR) in the simulator via UDP/ROS.
Developed a multi-vehicle control tower software, including both server and client components with integrated database support.
Autonomous Driving SW Engineer
sonnet.ai, Daegu, South Korea
Feb 2023 - Apr 2024
Developed full-stack autonomous driving systems, including a Qt-based UI and remote vehicle control/data transfer over UDP for a robotaxi platform.
Engineered longitudinal and lateral control systems, incorporating actuator control, parameter tuning, and local path planning for smooth and stable driving, including curve handling.
Education
Master of Science in Electrical and Computer Engineering
University of California, Santa Cruz
2025 - Present
Bachelor of Science in Electrical and Electronic Engineering
Dankook University
2017 - 2023
Skills
Explore the technical proficiencies that empower me to build intelligent systems and autonomous solutions.
Programming
Proficient in C, C++, C#, and Python for developing robust software solutions.
Network Communication
Experienced in UDP, TCP/IP, and ROS for real-time data exchange and robotics applications.
Multithreading
Skilled in designing and implementing multi-threaded systems for high-performance computing.
Electrical Fundamentals
Solid understanding of voltage, current, and electrical principles for hardware interfacing.
Control Theory
Knowledgeable in PID control, compensators, and advanced control techniques for dynamic systems.
Dynamics
Experience in modeling and analyzing physical systems and their motion behaviors.
Circuit Modeling
Familiar with resistors, capacitors, inductors, transistors, and op-amps, including practical and simulation-based analysis.
Natural Language Processing
Experienced in processing and analyzing text data for language understanding tasks.
Deep Learning & Reinforcement Learning
Skilled in designing and training neural networks for perception, control, and decision-making tasks.
Exploring Robotics through Simulation and Real-World Experiments
A journey from foundational control methods to advanced AI-driven robotics. Discover how simulations, deep learning, and reinforcement learning converge to bring robotic intelligence closer to reality.
Project 1:
Lerobot model training using simulator for real-world implementation
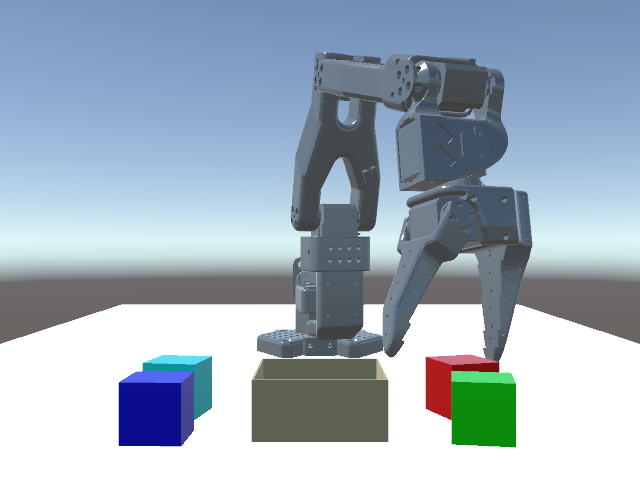
Description:
Before studying VLA, I implemented the ACT model using a simulator with transformers. Training data was collected from a top and front camera to capture object positions and grasping actions. The model was then deployed on a real robot arm to validate grasping performance.
Role:
Conducted research on ACT concepts and papers, and implemented the project using Hugging Face resources.
Project 2:
RoArm-M2-S Pick & Place (Personal project)
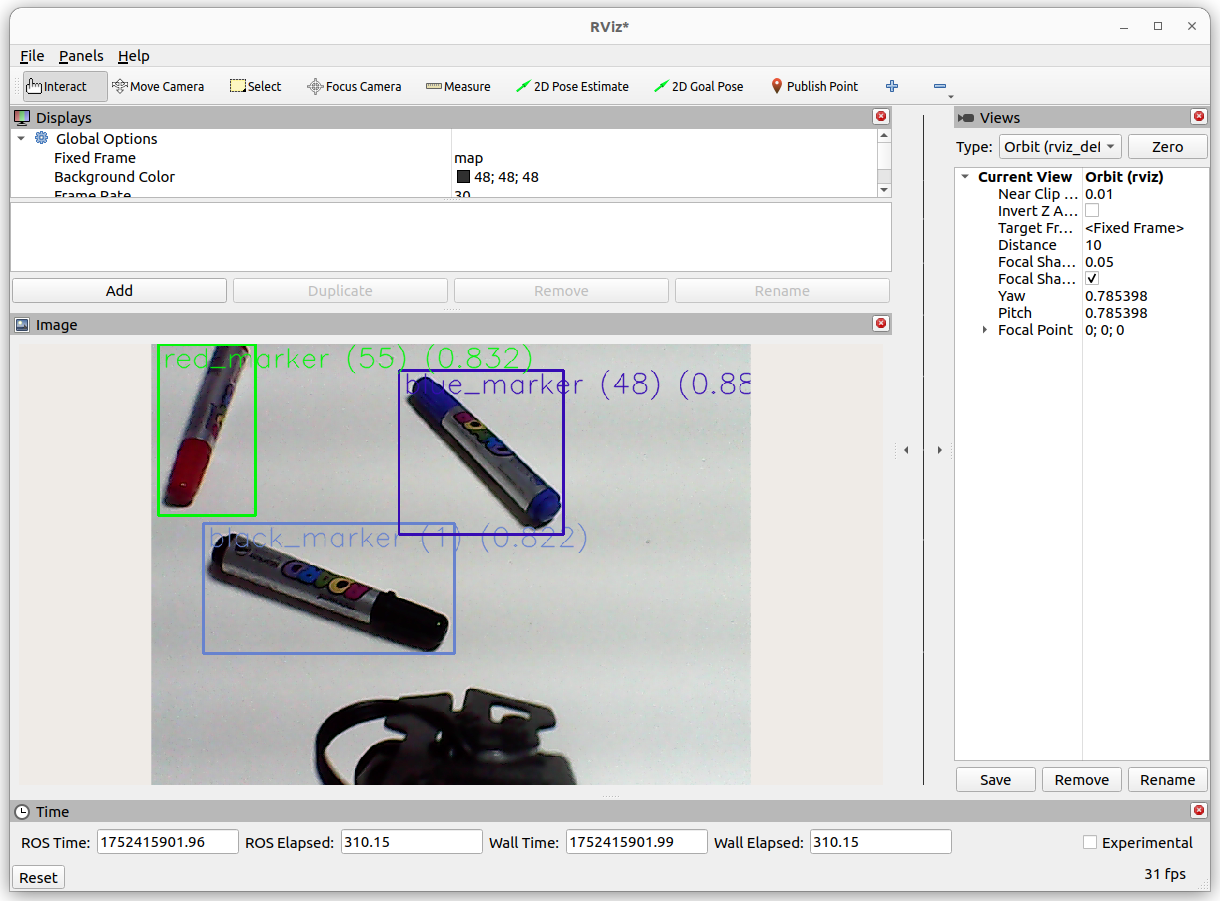
Description:
My first project involving a robotic arm used the YOLOv8 model to detect object coordinates. These were communicated via ROS2 topics and applied to inverse kinematics for a 4-axis robotic arm to perform pick-and-place tasks. Training was based on labeled images extracted from videos, followed by real-world testing.
Role:
Implemented Inverse Kinematics and PID control, and designed behavior sequences using Groot’s behavior tree editor for structured robot control.
Project 3:
Genesis AI - Generative Simulator
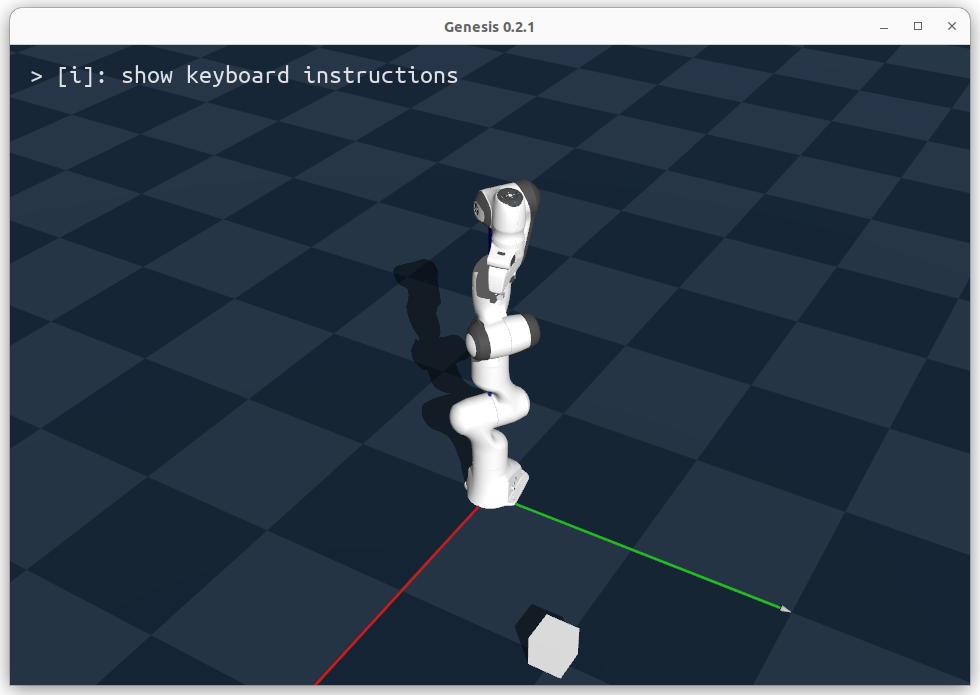
Description:
Genesis AI is a generative AI-powered simulator that creates environments from text prompts, enabling users to control robots manually or through reinforcement learning. Currently, robots can complete simple missions, with plans to expand toward more complex environments, missions, and robot models.
Role:
Ongoing project; currently developing and expanding features.
Recommendations
See what my professors and colleagues say about me.
" I have known Mr. Kim for over five years and witnessed his growth as a student and engineer. He is not only technically skilled—capable of integrating complex systems with hardware—but also highly collaborative and receptive to feedback. His drive, adaptability, and engineering mindset make him a remarkable candidate for any position. "
Jaehoon Jung
Professor of Electrical and Electronics Engineering, Dankook University
" As a software engineer at Sonnet.AI, Mr. Kim made significant contributions to our autonomous driving platform. He created systems that enabled safe remote vehicle management and enhanced real-world vehicle performance. His curiosity and innovative spirit earned him our Best Sonnetian Award, reflecting his potential as both an engineer and researcher. "
Joonwoo Son
CEO, Sonnet.AI (Robotaxi Startup)
" Mr. Kim stood out in my Control Systems class with his ability to connect theory to real applications. His projects demonstrated both mastery of concepts and creativity in execution. Beyond academics, he has pursued autonomous driving research and industry roles with determination, showing he will excel in graduate studies and contribute to the field. "
Kyungmoo Huh
Professor of Electronics and Electrical Engineering, Dankook University
" I first taught Mr. Kim in English literature, where he excelled both academically and interpersonally. He consistently encouraged peers, worked with enthusiasm, and maintained strong relationships even after graduation. His warm character, dedication, and professional growth in autonomous driving ensure he will thrive in graduate studies and contribute meaningfully to research. "
Jeong-Hee Kim
Professor of English Literature, Dankook University
" ... It would have been impossible to complete our project without Hankyu’s help. His problem-solving mindset and willingness to support the team made a huge difference ... "
Mina Jung
Senior Developer
" ... Working with Hankyu was a real comfort ... He always brought positivity and dedication, and I am confident he will excel anywhere he goes ... "
Heewon Jung
Senior Developer