· Control · 2 min read
Understanding Dynamic Compensation: A Simple Guide
Compensation techniques such as PD, Lead, PI, and Lag are essential in control engineering. They shape transient response, steady-state error, and stability margins by modifying the frequency characteristics of systems.

Compensation techniques are used to improve system performance by shaping the dynamics. Among the most important methods are PD compensation, Lead compensation, PI compensation, and Lag compensation. Each method influences transient response, steady-state accuracy, and stability margins in different ways.
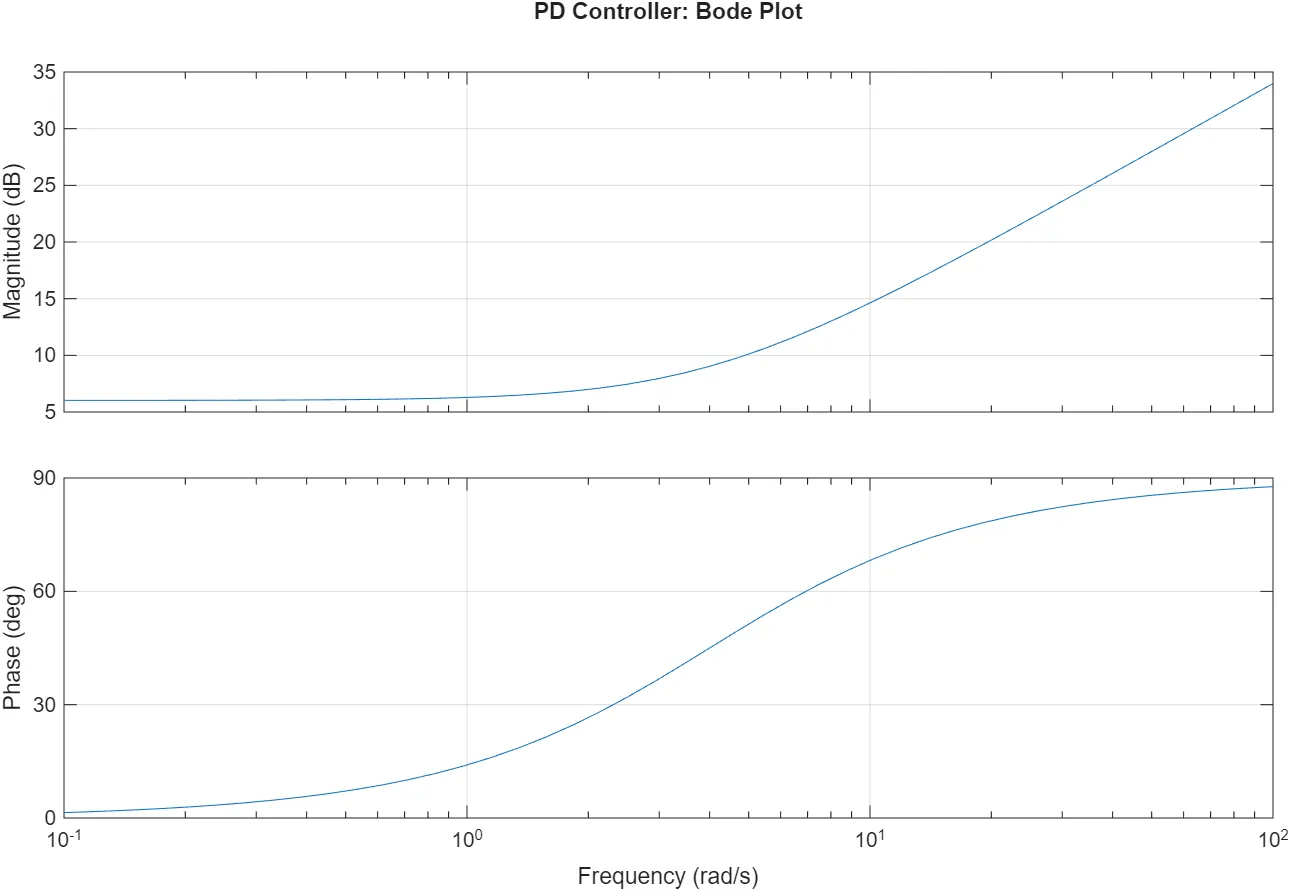
PD Compensation
The transfer function of a PD controller is:
in frequency domain,
where break frequency is:
- Pros: It leads the phase, which means making the system respond faster.
- Cons: Sensitive to high-frequency measurement noise.
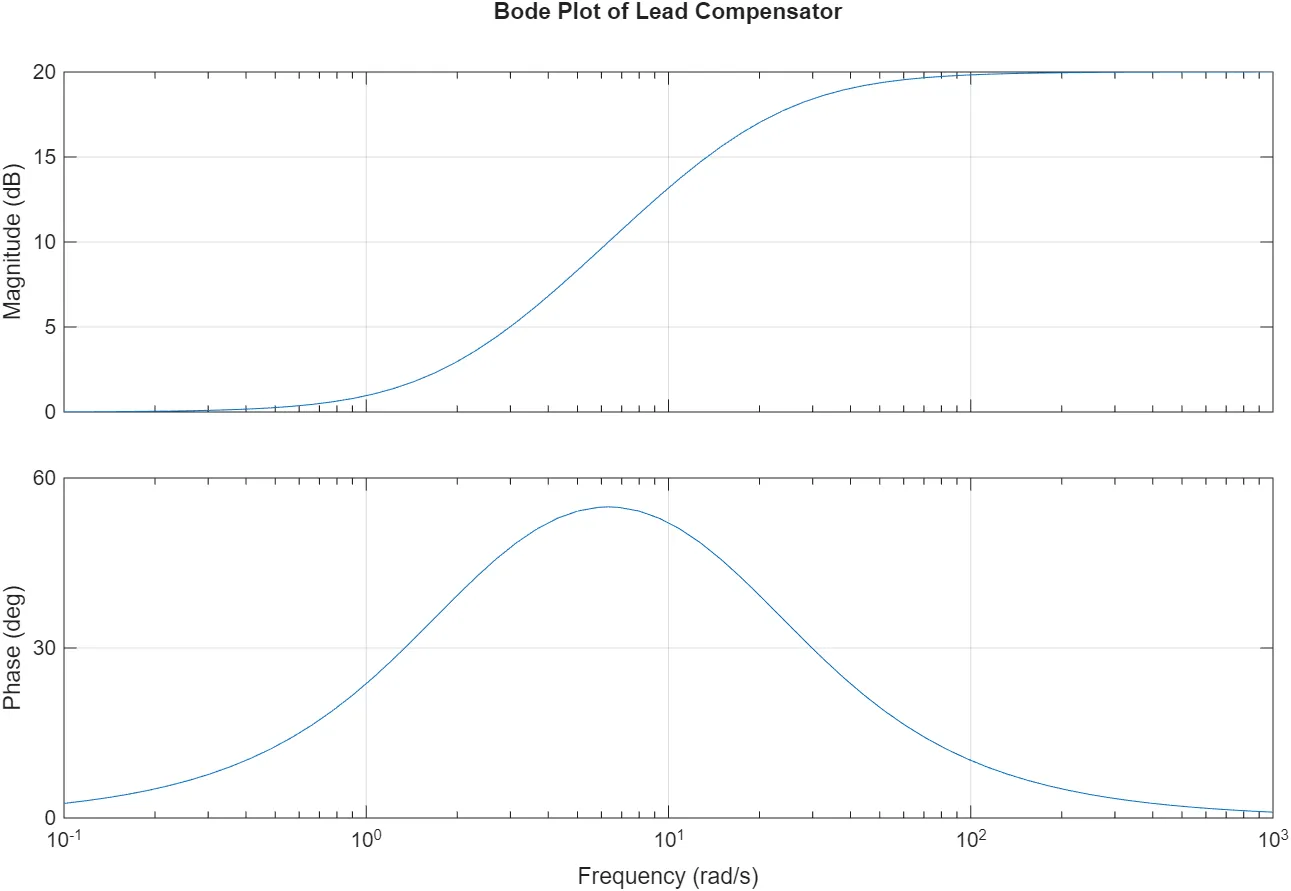
Lead Compensator
The transfer function of a lead compensator is:
where break frequency is:
break frequency ‘αT_D’ is added.
- Restrict high-frequency gain.
- But also restrict ‘Phase Lead’ effect.
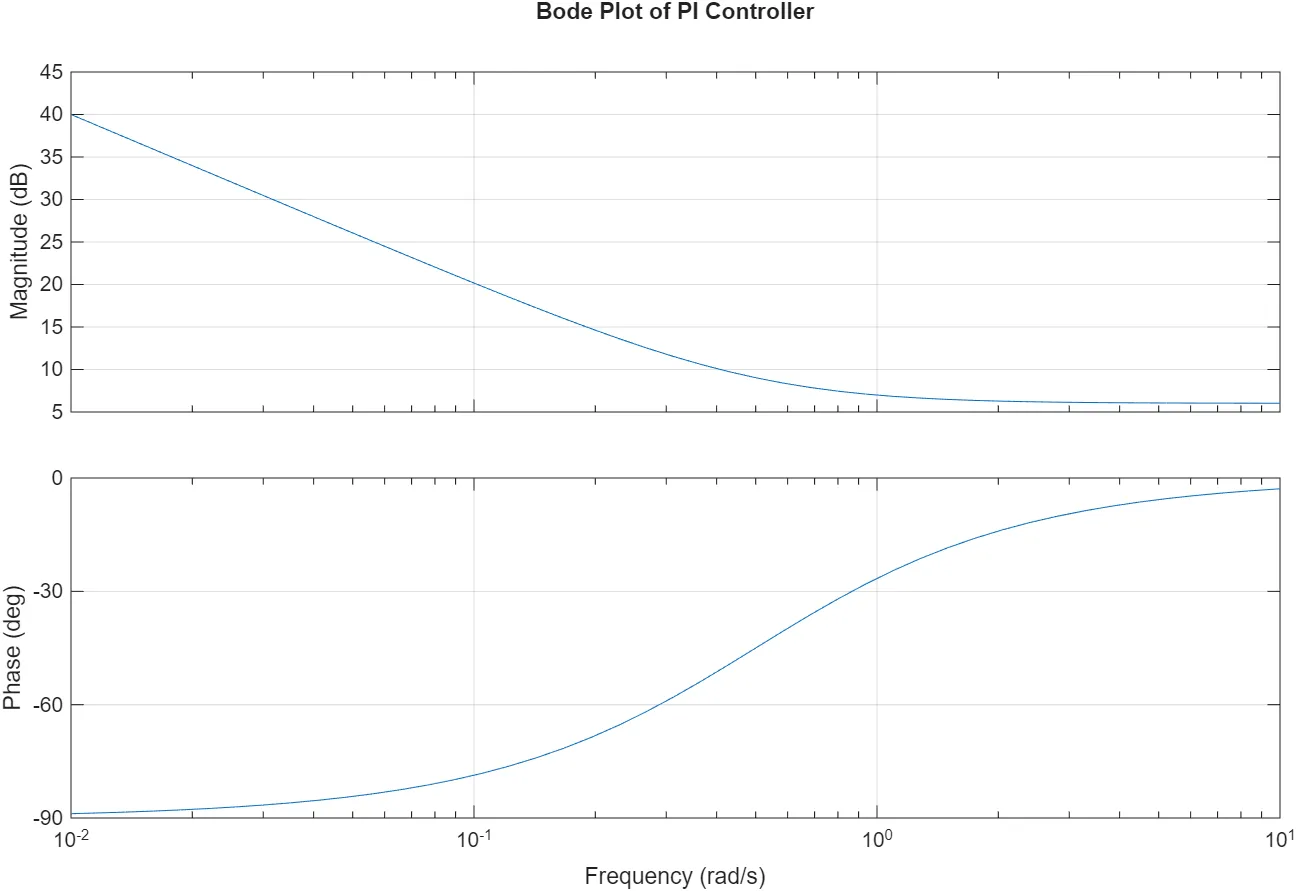
PI Compensation
The transfer function of a proportional–integral (PI) controller is:
in frequency domain,
where break frequency is:
- Pros: Infinite gain at the origin, which means eliminating steady-state error by increasing system order with adding pure integrator
- Cons: May slow response on low-frequency area, especially at the origin
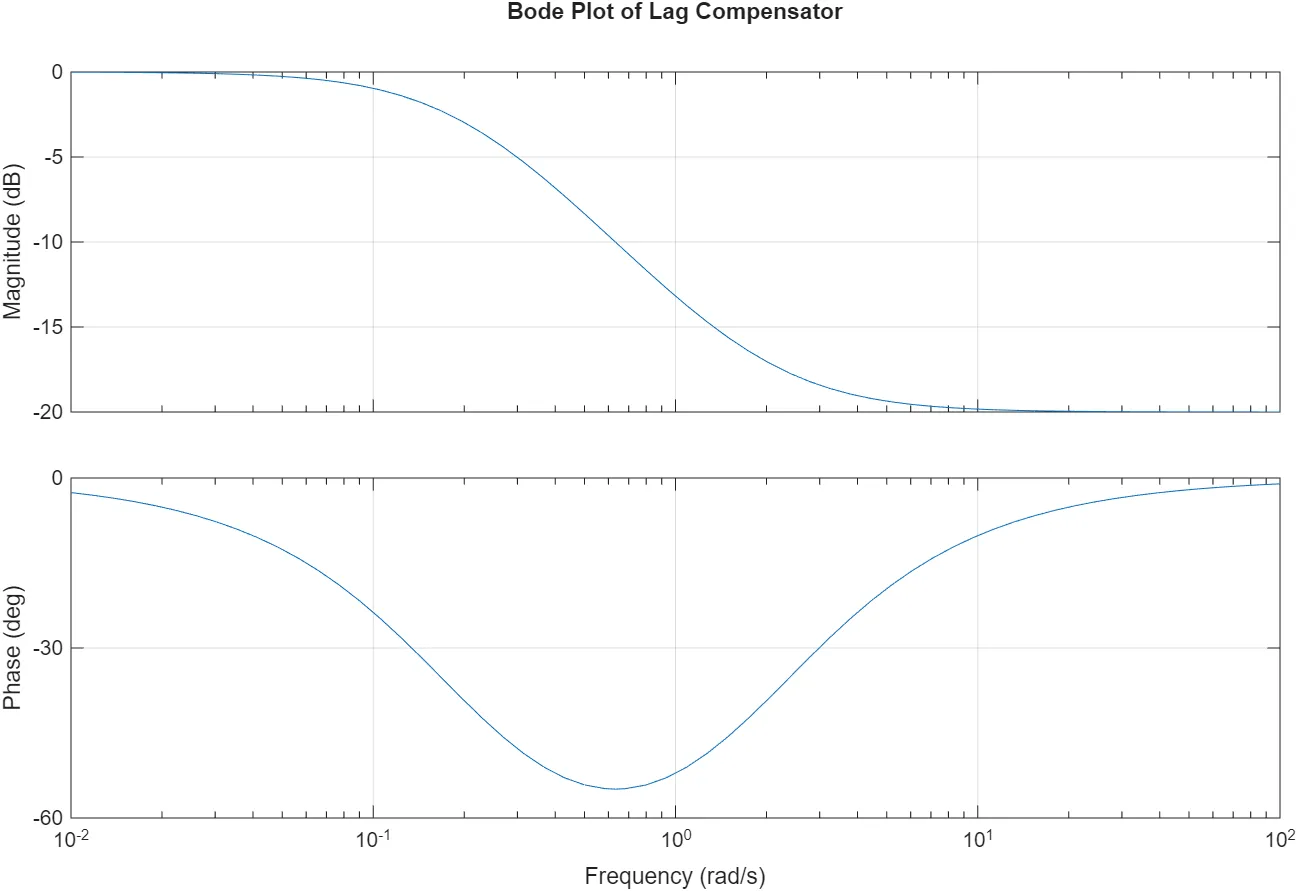
Lag Compensator
The transfer function of a lag compensator is:
where break frequency is:
Unlike the PI controller, this one does not have a pole at the origin.
not likely PI controller, this does not have ‘s’ on 0.
- It has a limited phase lag effect at low frequencies.
- It also limits the amplification effect at low frequencies.
- Depending on the design, phase lag can be applied only to specific frequency regions.
- In frequency ranges where phase lag is not needed, other performance improvements are still possible.
Summary
PD vs Lead: Both enhance transient performance.
- PD improves response speed but is noise-sensitive.
- Lead improves stability and robustness.
PI vs Lag: Both improve steady-state accuracy.
- PI completely eliminates steady-state error but may slow the system.
- Lag reduces steady-state error more gently while keeping transients intact.
Together, these compensation methods provide flexible tools for shaping system behavior in automatic control.



