· Hankyu Kim · Filter · 3 min read
Low Pass Filter (LPF)
A low pass filter reduces noise while emphasizing recent measurements, overcoming the limitations of uniform averaging in moving average filters.

Introduction
This post introduces the Low Pass Filter (LPF) from a control systems perspective.
In electrical engineering, LPFs are commonly studied in signal processing or image processing courses.
They are typically used to attenuate high-frequency noise while preserving low-frequency components.
Rather than focusing on hardware implementations using R, L, and C components, this post explains LPF as a software-based recursive filter, building directly on moving average filters.
Review: Limitation of the Moving Average Filter
The moving average filter improves upon the simple average by considering only a recent window of data.
However, it has a critical limitation:
All samples within the window are treated equally.
Consider the sequence:
Assume a window size of .
At time , the window becomes:
The moving average assigns each value a weight of .
But observe:
- 2 is 5 seconds old
- 3 is 4 seconds old
- 6 is the most recent measurement
Despite this, all samples contribute equally.
Motivation for Low Pass Filtering
In real systems, recent measurements are usually more informative than older ones.
A natural question arises:
What if we assign more weight to newer data?
For example, instead of computing
we could emphasize the most recent value:
This produces an estimate that reacts faster to changes while still suppressing noise.
Core Idea of the Low Pass Filter
A low pass filter can be interpreted as a weighted moving average, where newer samples receive higher importance.
In recursive form:
where:
- is the previous filtered value
- is the current measurement
- is a weighting factor with
The parameter controls how strongly the filter reacts to new data.
Comparison with Moving Average
Moving Average
Equal weights for all samples in the windowLow Pass Filter
Larger weight on recent samples
Smaller weight on older information
This difference becomes increasingly important when:
- The signal changes rapidly
- The window size is large
- Tracking accuracy matters
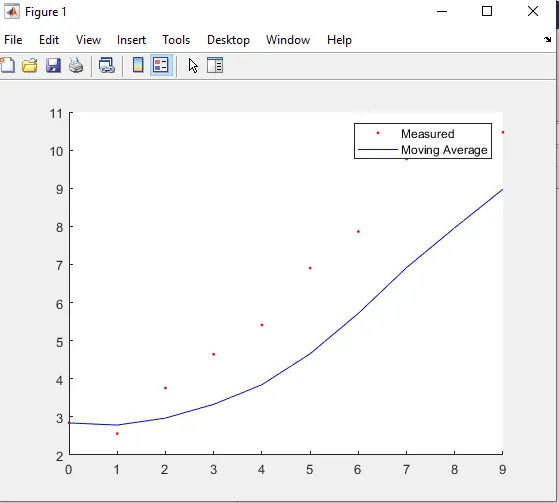
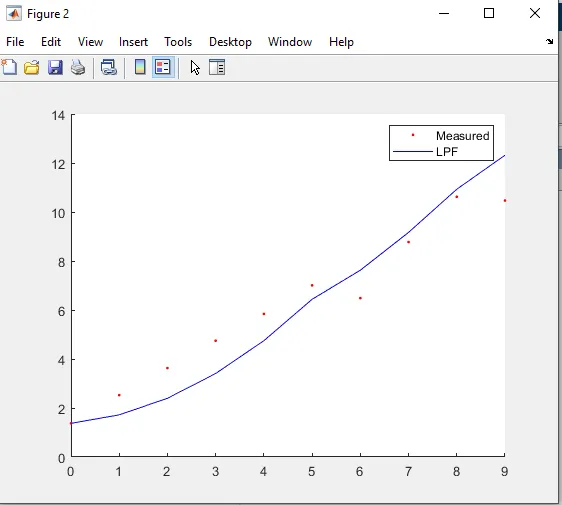
Visual Comparison Insight
When tracking a signal such as:
- Moving average exhibits noticeable lag
- Low pass filter follows the trend more closely
Even with a small number of samples, the improvement is visually apparent.
Practical Recursive Update
In implementation, LPF often appears as:
This form highlights that:
- The filter corrects the previous estimate
- The correction magnitude depends on
This structure is fundamental in control and estimation theory.
Why This Matters
- LPF balances noise suppression and responsiveness
- It generalizes moving average filters
- It directly leads to Kalman filtering concepts
Choosing appropriately is critical:
- Small → smoother but slower response
- Large → faster response but more noise
Summary
- Moving average filters treat all samples equally
- Low pass filters emphasize recent measurements
- LPF reduces lag while maintaining noise suppression
- LPF forms the conceptual bridge to Kalman filters
Weighting recent information is the key to practical filtering.



